|
Santiago de Chile. |
 |
Número 71 Abril 2005 |
| |
 |
LA ECONOMÍA DE MEDIOS
EN LAS NUEVAS TECNOLOGÍAS
Si desea escribir a Sara Malinarich puede hacerlo a saravirtual@hotmail.com , sitio web: www.saramalinarich.netPor Sara Malinarich
De un tiempo a esta parte las nuevas tecnologías han tomado un papel preponderante en el privilegio de financiamientos por parte de las instituciones públicas y privadas. Parece haber un acuerdo en apostar por proyectos artísticos que usan los nuevos medios. Esto es razonable si pensamos que aún no existen bases certeras acerca del alcance filosófico, jurídico y fáctico de esta nueva dimensión de la realidad.
Es tan fuerte el cambio en el paradigma del arte tras el desarrollo del arte digital que aún no podemos despegarnos de viejas aprehensiones: Problemas tales como los territorios intelectuales (ideas originales y derivadas), la localización del arte v/s publicación de información, la manipulación o para algunos malversación de la información, el tema del usuario v/s espectador, la coautoría, la cita, etc. Es decir, un compendio de no certezas que muchas veces se transforman en temores. Pero esto es parte de un próximo artículo.
Volviendo al tema del apoyo creciente a los proyectos artísticos que ocupan nuevas tecnologías, queremos detenernos no en aquellos costosos, sino en los económicos. Esto debido a que para muchos artistas los recursos para sus investigaciones no llegan y han debido economizar en medios pero no en inteligencia, estudio y esfuerzo, sustentando así sus obras en soluciones económicas, efectivas, fuera de la elite y con gran genio creativo.
Un caso puntual es el proyecto "Inexpensive Non-Sensor" http://csdl.computer.org/comp... , de los artistas Adrian David Cheok, Neo Weng Chuen Edmund y Ang Wee Eng, realizado en marzo del 2002, Basado en el proyecto Realidad Aumentada que Modela Curvas y Superficies en el Espacio Físico.
En su base, fundamentan que en los trabajos previos para modelar curvas y superficies en el espacio aumentado de la realidad (AR) se han utilizado sensores costosos, sensores tales como los sensores magnéticos. En este trabajo, ellos proponen un sistema AR donde un usuario puede modelar superficies interesantes, prescindiendo de costosos sistemas.
" Presentamos un sistema completo para la captura viva del contenido tridimensional y de la presentación simultánea en realidad aumentada. El usuario ve el mundo verdadero de su punto de vista, pero se modificó para rendir la imagen de un colaborador alejado a la escena.
Quince cámaras fotográficas rodean a un colaborador, y las corrientes de vídeo que resultan son usadas para construir un modelo tridimensional, usando un algoritmo para conseguir una forma tipo silueta".
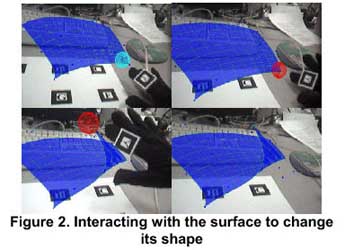
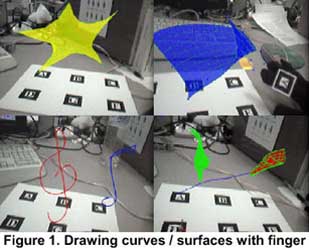
Los usuarios poseen un marcador fiducial [1] de dos dimensiones usando a vi'deo-ver-por interfaz aumentado de la realidad. La relación geométrica entre el marcador y la cámara fotográfica se calcula, y la vista equivalente del tema se computa y se dibuja dentro de la escena. Nuestro sistema puede generar 384 imágenes del pixel del × 288 de los modelos en 25 fps, con un estado latente de < 100ms. El resultado es la fuerte impresión de que el tema (dibujo o modelo) es una parte real de la escena tridimensional".
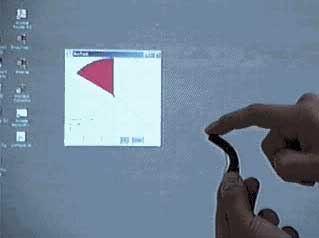
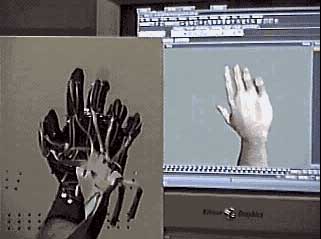
Esto es: un usuario se coloca un guante que posee un marcador fiducial en el dedo índice y además posee cámaras conectadas al ordenador. Ambos dispositivos se unen en la escena dentro del ordenador (visualizador) y generan una realidad híbrida entre la realidad captada por la cámara y el dibujo que demarca el usuario con su dedo. Con la herramienta marcador fiducial, el usuario puede dibujar en el espacio elementos en 2D y 3D, modelar y mover los puntos de un dibujo (en una malla).
Este proyecto ha tenido gran aceptación por parte de la comunidad científica y artística, llegando a presentarse en el International Symposium on Mixed and Augmented Reality 2002 .
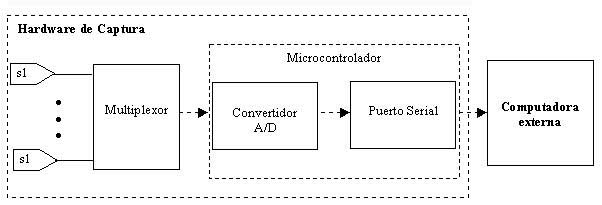
Otro proyecto interesante y nada costoso, en torno a los 80US, es el PROTOTIPO DE UN SISTEMA DE CAPTURA DE MOVIMIENTO de Hernando Ortega Carrillo , Victor Hugo Godoy Aguirre , Carmen Ramos Nava de México.
http://www.dpye.iimas.unam.mx/mocap/MocapSystemSP.html .
Aquí se "describe en forma breve el prototipo de un sistema que permite registrar y visualizar en tiempo real el movimiento de las articulaciones del cuerpo humano. La principal ventaja de este sistema es que puede operar completamente, aún utilizando un equipo PC de bajo costo; otras ventajas importantes son: el bajo costo de hardware del sistema y de los sensores, no requiere de ambientes controlados y el tiempo requerido para su calibración es mínimo."
Por tanto, y aunque parezca complejo, las herramientas son básicas, baratas y efectivas en la construcción de una arquitectura espacial síquica, perceptible (decodificada por un ordenador).
Enhorabuena a los creadores de estos sistemas, siempre que lo podamos ocupar, hablar de él y eventualmente usarlos libremete; a los que consiguen interesantes resultados y observaciones con mínimos recursos.
[1] Marcador Fiducial . Es un objeto muy simple, los Marcadores Fiduciales sólo tiene la información sobre la referencia a un punto del espacio, y son usadas para el alineamiento de cuerpos rígidos.

| |
¿No está suscrito? Suscribase aquí. |